

IC: Controle Cooperativo de Drones para Detecção de Falhas na Indústria 4.0.
- Victor Manoel Araújo
- 17 de set. de 2025
- 6 min de leitura

Discentes: Matheus Pereira de Andrade, Márcio Alexandre J. Crochela e Rafael Xavier Silva Cunha.
Orientador: Prof. Dr. Daniel Costa Ramos
Título: Controle Cooperativo de Drones para Detecção de Falhas na Indústria 4.0.
Nesta pesquisa os discentes Matheus Pereira de Andrade, Márcio Alexandre J. Crochela e Rafael Xavier Silva Cunha, foram os responsáveis por desenvolver a implementação e aprimoramento de um sistema em laboratório de nano drones cooperativos com capacidade de localização, com o objetivo de fomentar a pesquisa e a inovação, e comparar os simuladores disponíveis para os nano drones, analisando critérios como realismo, desempenho, motor físico e a facilidade de uso.
Materias e métodos
Utilizado como base de pesquisa, serão utilizados os nano drones da Bitcraze. Com eles realizou-se um amplo estudo para identificar as necessidades e possibilidades avançadas de implementação desses drones em laboratório de pesquisa.
Figura 1: Componentes e conexões do Nano Drone.

O sistema de nano drones cooperativos da Bitcraze requer uma série de componentes e materiais específicos para seu funcionamento adequado. Os nano drones Crazyflie 2.1 são o centro do sistema, possuindo capacidades avançadas de voo e interação com o ambiente. O Crazyflie 2.1 é compacto e altamente manobrável, ideal para operações em espaços fechados.
Além do Crazyflie 2.1 os módulos de localização Loco Positioning System (LPS) são essenciais para a precisão na localização dos drones no ambiente. Esses módulos utilizam âncoras, que são dispositivos fixados no ambiente de laboratório para servirem como referências de posição para o sistema LPS.
Para a continuidade do trabalho também foi feita adoção de simuladores para os nano drones Crazyflie, que oferece vários benefícios, principalmente em relação à facilidade e eficiência na simulação de diferentes ambientes sem a necessidade de módulos adicionais incorporados à plataforma.
A utilização de simuladores é crucial em situações em que a verificação antecipada de scripts e comportamentos pode prevenir danos e problemas operacionais. O uso de simulações 3D para testar a programação do Crazyflie antes
de um voo real pode ajudar a evitar acidentes como hélices quebradas e outras falhas causadas por baterias fracas ou má comunicação. Assim, a capacidade de simular condições reais em um ambiente controlado não só reduz os perigos, mas também permite o desenvolvimento de tecnologias complexas de maneira mais segura e eficaz.
Neste projeto serão comparados três simuladores para o nano drone CrazyFlie: DroneBlocks, Webots e Gazebo (CrazySim). Cada simulador oferece uma experiência de simulação diferente para os usuários, com diferentes características, funcionalidades e usabilidade.
Desenvolvimento
O desenvolvimento do sistema de nano drones cooperativos envolveu uma série de etapas essenciais, desde a montagem e configuração dos Crazyflie 2.1, até a instalação e calibração do sistema de localização Loco Positioning System (LPS).
Inicialmente, foram realizados testes com módulos e sensores para garantir a detecção de obstáculos e a estabilização durante o voo. A montagem do LPS e a integração com os sistemas de controle foram fundamentais para assegurar a precisão na navegação e a segurança operacional dos drones.
Figura 2: Software e coordenadas.

Posteriormente, testes de voo e navegação foram conduzidos para avaliar o desempenho do sistema em diferentes condições, usando o controlador PID padrão. A integração de sensores adicionais permitiu a ampliação das capacidades dos nano drones, contribuindo para a execução de tarefas complexas. O processo foi concluído com a avaliação de desempenho, onde os dados coletados foram analisados para identificar melhorias e otimizações. Todo o sistema foi documentado para garantir a replicabilidade do projeto em futuras pesquisas e aplicações.
Figura 3: Teste de rota para coordenadas.
Simulação
O DroneBlocks oferece uma experiência de programação e simulação acessível e fácil de entender para pilotos de todos os níveis de habilidade, graças a um conjunto de recursos essenciais. Além da simulação é possível executar o código de blocos criado dentro do simulador para o nano drone real, fazendo assim um sistema onde se pode testar o código no simulador antes de executá-lo no ambiente real.
Figura 4: Código em blocos do DroneBlocks.
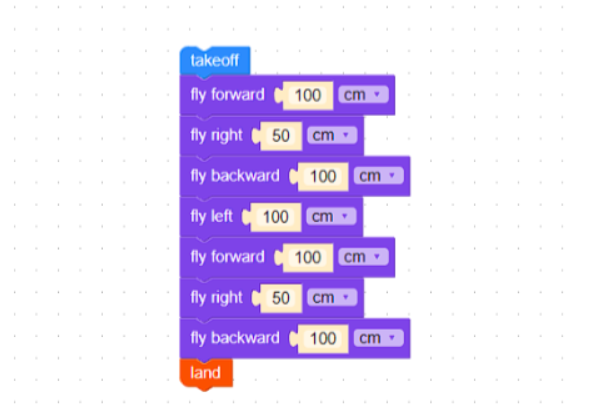
A integração da simulação dos DroneBlocks permite testar e aprimorar os códigos em tempo real. Esta função não apenas economiza tempo, mas também aumenta a segurança, permitindo verificações pré-voos. Os testes são realizados com precisão porque o ambiente de simulação mostra em detalhes as características físicas do Crazyflie.
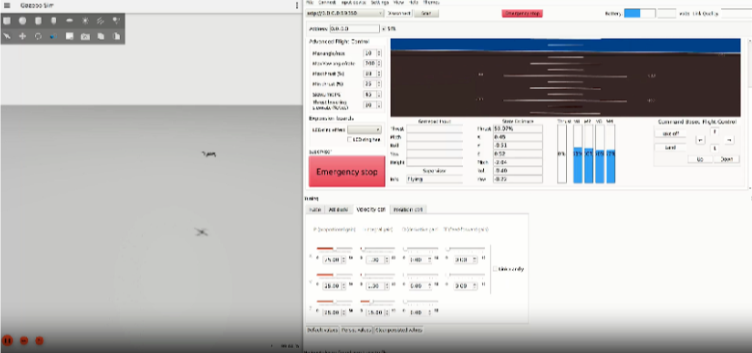
O segundo simulador avaliado foi Webots, no qual a Cyberbotics, criadora do simulador, focou em uma plataforma para simular robôs em três dimensões. Uma das vantagens do Webots é sua compatibilidade com uma ampla gama de modelos de robôs pré-definidos, bem como sua capacidade de criar modelos personalizados usando uma interface de usuário fácil de usar. Além disso, a plataforma permite a programação de robôs em uma variedade de linguagens, como C, C++, Python, Java e MATLAB, o que facilita a integração com várias ferramentas de desenvolvimento.
Figura 5: Simulador Webots.
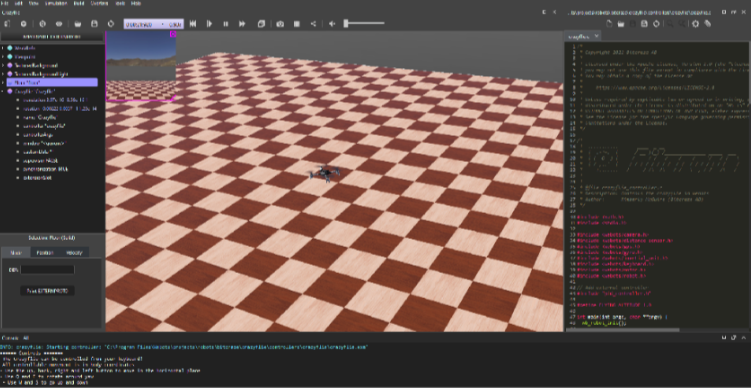
O terceiro simulador analisado, o Gazebo, foi utilizado um projeto externo (Crazysim) feito para o nano drone Crazyflie e simula um nano drone para ser usado com a biblioteca cflib, feita em Python pela Bitcraze.
Gazebo é um simulador de robótica de código aberto que oferece uma plataforma realista para simular robôs em diferentes ambientes. Suas características mais notáveis incluem o realismo físico, que permite a simulação realista das interações físicas entre os objetos por meio do uso de motores físicos como ODE, Bullet e DART; a criação e personalização de ambientes tridimensionais, que são essenciais para simulações de mapeamento e navegação; suporte para vários tipos de sensores, incluindo LIDARs, câmeras, sensores de proximidade e GPS, que podem ser integrados a modelos de nano drones; e uma integração perfeita com o sistema de operação robótica (ROS), que facilita a implementação e teste de algoritmos de controle desenvolvidos em ROS.
Figura 6: Simulador Gazebo com o CrazySim
Resultados
A implementação e os testes do sistema de drones cooperativos utilizando o Bitcraze Crazyflie 2.1 revelaram resultados significativos em termos de precisão de localização, estabilidade de voo, eficiência dos sensores e desempenho geral.
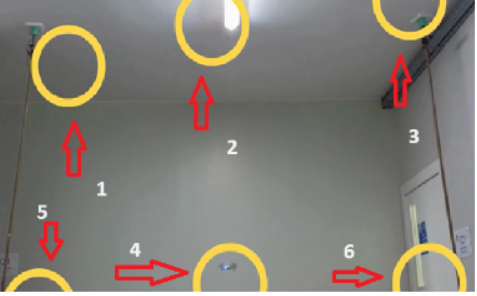
No que se refere à precisão de localização com o sistema Loco Positioning System (LPS), as medições indicaram uma margem de erro inferior a 1,60 cm em ambientes controlados. Essa alta precisão foi mantida mesmo em cenários com obstáculos, demonstrando a eficácia das âncoras e das adaptações realizadas nas hastes de sustentação.
A estabilidade de voo foi assegurada através do uso do módulo Flowdeck, que ajustou automaticamente a altitude dos nano drones em diferentes condições, foi possível escolher essa altura pelo software, sendo utilizado uma altura de 60 cm do solo.
Quanto à eficiência dos sensores, o Multiranger mostrou- se altamente eficaz na detecção de obstáculos e na medição de distâncias. Durante os testes, os nano drones foram capazes de identificar e evitar obstáculos autonomamente, o que é essencial para a operação segura em ambientes de ensino e pesquisa.
Nos testes de voo e navegação, obteve-se trajetórias complexas e pré-programadas com elevada precisão, utilizando os dados de localização fornecidos pelo LPS.
Para a simulação o desempenho observado durante as etapas de instalação dos simuladores, o teste inicial e o teste padronizado, foram a base da análise para elencar os prós e contras de cada simulador.
A escolha do simulador mais adequado depende das necessidades únicas do usuário. O DroneBlocks é ótimo para iniciantes e uso educacional, o Webots é ótimo para apresentações visuais e simulações detalhadas, e o Gazebo com CrazySim é o melhor para desenvolvedores avançados que precisam integrar simulação e uso prático do nano drone Crazyflie.
Esses resultados mostram a importância do sistema para ensino, pesquisa e extensão. O uso de nano drones cooperativos em laboratórios acadêmicos oferece uma plataforma versátil para a exploração de conceitos avançados em robótica e automação. No ensino, o sistema permite que os estudantes interajam diretamente com a tecnologia, desenvolvendo habilidades práticas e teóricas, além de atualmente serem usados para dois trabalhos de conclusão de curso.
Conclusão
Este trabalho evidencia o potencial dos drones cooperativos em ambientes de pesquisa e ensino, oferecendo uma ferramenta valiosa para a realização de operações complexas de forma autônoma e segura. As áreas identificadas para melhorias e otimizações apontam para um futuro promissor, com a possibilidade de expandir ainda mais as capacidades e aplicações dos drones. Assim, este projeto contribui significativamente para o avanço da tecnologia de drones e sua aplicação em diferentes contextos educacionais e científicos, abrindo caminho para novas pesquisas e desenvolvimentos nessa área.
A análise de desempenho revelou que o sistema de drones cooperativos é altamente eficiente, com consumo de energia adequado e resposta imediata aos comandos de controle. A documentação completa do sistema, incluindo manuais de operação e protocolos de segurança, assegura a replicabilidade e sustentabilidade do projeto, fornecendo uma base sólida para futuros desenvolvimentos e a formação de novos operadores.



Comentários