

Evolução dos Kits Robóticos com Rodas
- Daniel Costa Ramos
- 10 de mar. de 2015
- 7 min de leitura

Atualizado: 5 de mar. de 2022
Eu encontrei alguns artigos que descrevem a evolução dos kits de robótica móvel (com rodas) ao passar dos anos e resolvi completar as listas com alguns modelos adicionais e nacionais. Neste post eu descrevo 42 kits (2000 a 2014). Os links dos artigos originais (em inglês) estão ao final da página e há links para as páginas dos robôs.
01 (2000) Robotic Turning Frog Kit KSR2

É um kit que surgiu no início de 2000 e oferecia aos futuros engenheiros uma chance de trabalhar com componentes eletrônicos e mecânicos, ao movimentar as plataforma e detectar sons. Era uma época em que os microcontroladores PIC reinavam em absoluto.
02 (2001) K’Nex Cyber K’Nex Ultra 2.0 Robot Kit

Em 2001, a K’Nex lança um dos melhores “brinquedos” modulares da época que possibilitava os usuários construirem e programarem diferentes tipos de robôs.
03 (2001) Palm Pilot Robot Kit

No mesmo ano, o Instituto de pesquisa da Carnegie Mellon teve algumas iniciativas na área da robótica. Assim, surgiu o primeiro kit programável capaz de exibir gráficos e interagir com o usuário através de uma interface gráfica.
04 (2001) ARobot Mobile Robot

Outro kit voltado para futuros engenheiros também foi lançado no mesmo ano. O foco do kit era a introdução da robótica em salas de aula e a possibilidade de experimentos ilimitados para os alunos.
05 (2001) Mark III Complete Kit

Esse conjunto de componentes tinha tudo que era preciso para construir um pequeno robô: sensores, motores, microcontrolador e muita documentação.
06 (2002) Parallax SumoBot Robot Kit

Foi um dos primeiros robôs desenvolvidos para competições de mini-sumo de robôs. Podia embarcar uma IA simples e usar uma variedade de sensores para desviar de outros robôs.
07 (2002) K-Team Hemisson

O Hemisson foi projetado pela K-Team com foco na educação e no ensino. Equipado com sensores de distância e um microcontrolador PIC, o robô conseguia desviar de obstáculos, detectar luminosidade e seguir linha. Ainda possuía um led programável, buzina e relés. Por muito tempo esteve presente em diversas universidades.
08 (2002) K-Team Khepera II

O Khepera é uma versão menor do Hemisson com funcionalidades similares. Também foi desenvolvido com foco na educação e pesquisa, tendo foco no desenvolvimento de planejamento de trajetórias, desvio de obstáculos, pre-processamento de informação dos sensores, dentre outros.
09 (2004) – IdMind Robô Circular GT

Este robô programável português possui base circular e modularidade, capaz de acomodar diferentes tipos de sensores. É programado usando várias linguagens, nas quais se incluem uma linguagem gráfica.
10 (2005) – IdMind Raposa

Concebido para operar em ambientes hostis ou de difícil acesso a humanos, este robô português foi utilizado como plataforma de trabalho em diferentes projetos de investigação. Possuía características ideais para a participação no Robocup Rescue. O Raposa é um robô tele-operado, com PC a bordo e com amplas capacidades sensoriais.
11 (2005) – qfix

Com vários sensores e uma estrutura simples, este kit robótico tinha um custo menor e foi muito utilizado como ferramenta educacional e de treinamento. Com estas qualidades, ficou gravado na mente de muitos roboticistas, principalmente dos que o utilizaram em competições.
12 (2005) Parallax Boe-Bot Robot Kit

Esse robô introduziu a linguagem de programação PBASIC desenvolvido pela Parallax. A estrutura do kit permite ao usuário adicionar componentes para aplicações específicas.
13 (2005) SAM r I Sumo Robot Kit

Outro kit desenvolvido com foco na educação. Qualquer pessoas sem conhecimentos avançados de programação conseguia programá-lo para competições de sumo de robôs.
14 (2007) The VEX Robotics Design System

Em 2007, a Vex lançou um kit robótico para propósitos diversos que mudou o que era conhecido sobre as competições. O kit contém motores elétricos, rodas, sensores e sua estrutura permite vastas modificações na estrutura e adições de componentes. A estrutura ainda é utilizada atualmente por alunos iniciantes na robótica.
15 (2007) Microcamp Mega8 Robot Kit

Esse kit, lançado em 2007, se tornou popular especialmente na Ásia devido ao seu baixo custo e alta versabilidade. Foi utilizado principalmente para aplicações de seguir linha e desvio de obstáculos.
16 (2008) 3pi Robot Starter Kit

Essa plataforma ficou popular com os iniciantes devido aos seus componentes diferenciados, que incluía motores com caixas de redução, sensores de melhor precisão, um microcontrolador Atmel, dentre outros componentes.
17 (2009) POP-BOT

Alguns anos após o seu lançamento, o Arduino se popularizou e passou a ser utilizado em diversos kits. O POP-BOT foi uma das primeiras plataformas com rodas totalmente compatível com o Arduino.
18 (2009) Curumim

O Curumim é um kit que consiste de uma plataforma robótica e um ambiente para programação para robôs com o objetivo de promover o desenvolvimento educacional. Foi umas das primeiras iniciativas de empresas brasileiras na área da robótica.
19 (2010) PICAXE-20X2 Microbot

Já em 2010, começaram a surgir plataformas de baixíssimo custo, ao exemplo do Picaxe.
20 (2011) – Robodeck

O RoboDeck é uma plataforma robótica para pesquisa e ensino técnico. Foi um dos primeiros robôs de grande porte desenvolvido para fins comerciais no Brasil.
21 (2011) J-Bot Robot Kit

É uma plataforma de baixo custo que ainda é popular e é utilizada por hobbystas para aprender sobre robótica e sobre o Arduino.
22 (2011) Pioneer 3-AT

Os robôs Pioneer são versáteis e atualmente são amplamente utilizados em pesquisas e desenvolvimento de softwares avançados. Seu sistema consiste de sensores como GPS, ultrasom, bumpers, laser (opcional) e conta com um sistema embarcado avançado.
23 (2011) – Powerbot

O PowerBot é uma versão de maior porte dos robôs Pioneer, também direcionado para pesquisas avançadas. É capaz de suportar uma carga maior e pode ser utilizado em conjunto com manipuladores ou sensores de maior precisão.
24 (2012) – Robô Uno
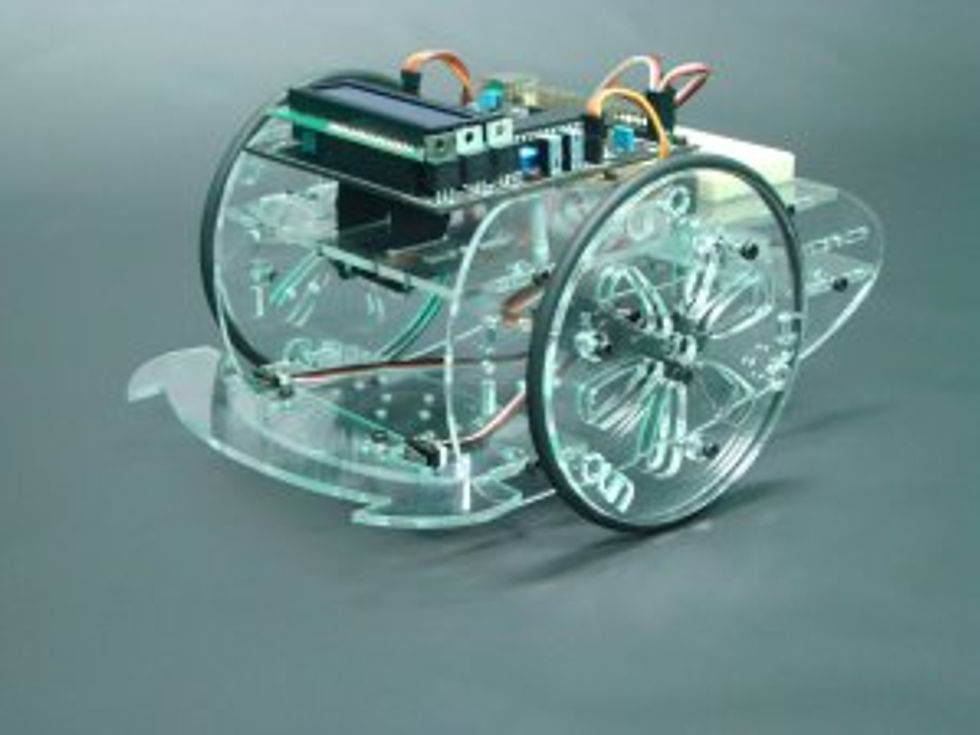
O robô UNO é uma iniciativa nacional para aprendizado de robótica, eletrônica e programação. Possui chassi em acrílico, dois motores com redução interna, pneus de borracha, LCD, alto falante tipo buzzer, cinco teclas programáveis, controle remoto IR e sensores diversos. O robô pode ser programado na linguagem C ou no Studio UNO (ambiente gráfico gratuito baseado no Scratch do M.I.T.)
25 (2012) – MAKE Rovera 2WD

Neste ano (2012) o uso das plataformas em acrílico ficou ainda mais popular, assim como a diversidade de sensores e componentes. Este kit é um exemplo, com baixo custo e baseado em Arduino, é capaz de seguir linha e desviar de obstáculos.
26 (2012) – MINDS-I

Assim como o anterior, os robôs baseados em Arduino passaram a dominar o mercado. Há diferentes soluções de estrutura e muitas variações nos componentes e preços.
27 (2013) – LEGO Mindstorms EV3

A LEGO lançou em 2006 o seu primeiro kit robótico compatível com seus brinquedos. Devido ao seu sucesso, foram lançados outras duas atualizações. Em 2009, surgiu a versão NXT e em 2013 a versão EV3. Estes kits são muito populares em colégios e universidades, sendo utilizados tanto na aprendizagem quanto em projetos avançados.
28 (2013) – Arduino Robot

Em 2013, a marca Arduino lançou sua própria plataforma robótica com duas placas e dois processadores. Ao mesmo estilo das placas microcontroladas, o robô é opensource e possui uma imensa documentação.
29 (2013) – ActivityBot

Outras empresas também entraram na onda de robôs mais simples e de menor custo. Este, desenvolvido pela Parallax, é programado em C, possui motores com encoders, sensores infravermelhos e ultrassônicos.
30 (2013) – MOSS

O MOSS é um conceito inovador que utiliza blocos para montar um robô móvel. Neste kit os projetistas podem utilizar esferas magnéticas para manter os blocos unidos. Cada bloco possui uma função específica e comunica-se com os demais sem necessidade de cabos.
31 (2013) – Wild Thumper

As versões outdoor dos robôs também passaram a ficar mais populares. Este robô é um exemplo, onde sua estrutura foi desenvolvida para ter boa tração e lidar com terrenos irregulares.
32 (2013) N8 Monster Kit v1.0

Com a popularidade do EV3, outros fabricantes passaram a investir em seus kits, oferecendo mais opções de estrutura e de componentes, ao exemplo do N8, que ainda possui variantes “Monster Kit”, “Building Kit” e “Starter Kit”.
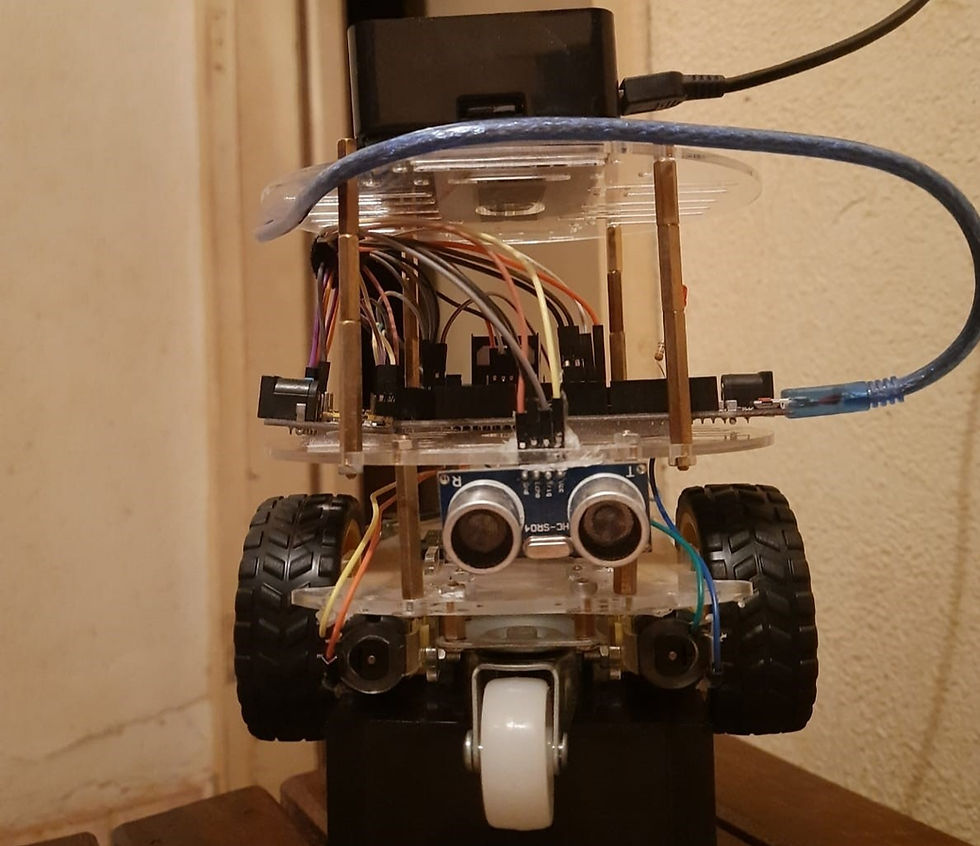
33 (2013) PiBot

Outras duas vertentes de kits robóticos tem ganhado espaço: os robôs com estrutura em MDF e com placas com maior capacidade de processamento. O PiBot reúne essas duas características ao utilizar um Raspberry Pi e uma estrutura de baixo custo.
34 (2013) Bot’n Roll

Bot’nRoll ONE C é um robô autônomo português desenvolvido com pensamento nos iniciantes na robótica.Todos os componentes são montados e soldados pelo utilizador seguindo as instruções do manual. O Bot’n Roll pode programado em C e BASIC.
35 (2014) – Sparki

Construído pela Arcbotics, essa plataforma móvel possui uma longa lista de componentes para os entusiastas do DIY (Do It Yourself).
36 (2014) – PopPet

Inteligente, fácil de montar e “fofo”. Esse robô tem vários adeptos devido a sua aparência e por ser baseado em Arduino. O seu “rosto” pode ser modificado para várias expressões, assim como seus componentes.
37 (2014) – Khepera IV

Com a experiência adquirida com os robôs Hemisson e Khepera, a K-Team ouviu as principais requisições dos seus clientes e criou uma nova versão de sua plataforma.
38 (2014) – Koala 2.5

Assim como seus concorrentes, a K-Team também desenvolveu uma versão de maior porte de seus robôs, com foco em aplicações outdoor.
39 (2014) – Turtlebot 2

TurtleBot é um robô open-source de baixo custo que utiliza o Kinect como principal sensor. Sua estrutura em níveis permite uma grande otimização de componentes e aplicações.
40 (2014) – Summit XL HL

O Summit XL HL é um dos novos modelos da Robotnik, capaz de operar em ambientes interno e externos, possui o diferencial de utilizar rodas omnidirecionais e ser compatível com o ROS (Robot Operating System).
41 (2014) – Linkbot

Em 2014 várias fabricantes tentaram inovar na área da robótica. O Linkbot é um exemplo, onde vários robôs podem ser integrados e utilizados de diversas formas sem a necessidade de programação. Duas funções que chamam atenção é a “Copycat” e a “PoseTeaching”. A primeira permite que um conjunto de robôs imite o movimento de uma referência, que pode ser um smartphone ou outro robô. O segundo permite que o robô reproduzir movimentos ensinados manualmente pelo usuário.
42 (2014) – Ozobot

Ozobot também inova pelo seu minúsculo tamanho, sendo capaz de seguir linha em tablets e outras superfícies coloridas. Pode ser utilizado tanto como brinquedo ou de forma mais avançada, ao programar suas ações.
Conclusão
É possível notar ao passar dos anos que os kits de robôs móveis ficaram cada vez mais diversificados, atendendo diferentes públicos. Atualmente há soluções de baixo custo disponíveis, assim como soluções de alta qualidade com preços mais salgados. Em ambos os casos, se busca atingir uma ampla diversificação das aplicações utilizando apenas uma plataforma.
Nota-se também que as fabricantes tem tentando inovar em seus projetos ao proporcionar uma maior integração com Smartphones e Tablets, e ao tornar os robôs mais fáceis de serem utilizados (ao mesmo tempo que fornece opções avançadas aos mais experientes).
Bônus! (1949) Elsie and Elmer – William Grey Walter

Em 1949 foram desenvolvidos robôs com características bem semelhantes aos atuais, mas que obviamente, eram muito mais simples. Eram robôs foto-sensíveis, que demonstravam uma “inteligência” primitiva ao reproduzir comportamentos de animais (em especial, das mariposas). Essas “tartarugas”, nomeadas de Elsie e Elmer, foram desenvolvidas por W. Grey Walter, um neurofisiologista e um dos pioneiros na robótica.


Comentários