

IC: Projeto e Análise de um Sistema de Sensoriamento Infravermelho Multiplexado para Competições
- Daniel Costa Ramos
- 27 de mar. de 2020
- 3 min de leitura

Atualizado: 5 de mar. de 2022
Orientado: Marcus Vinícius Santos de Oliveira Categoria: Robótica Data de Conclusão: 07/2019 – PIVIC Link: PDF Relatório Final
Os robôs móveis estão ganhando cada vez mais visibilidade, atuando nas mais diversas áreas como saúde, educação e na indústria. Uma parte desses robôs é denominada de robôs seguidores de linha devido a sua necessidade de usar marcadores contínuos para se localizar e/ou movimentar em um determinado ambiente.
Esses robôs são de interesse no ensino, em competições robóticas e até em automatização de armazéns devido a sua simplicidade de codificação. Nesta última aplicação, os robôs otimizam o controle de estoque e permite a escalabilidade das operações, sem que haja redução do quadro de empregados da indústria. Um exemplo de sucesso desta utilização é o da empresa AMAZON e o robô WEASEL produzidos produzido pela SSI Schaefer.

Robô WEASEL feito pela SSI Schaefer e armazém da AMAZON. Fonte: SSI Schaefer e Denver Channel
Apesar do robô seguidor de linha ser um assunto relativamente comum na área da robótica,ele apresenta uma relativa complexidade quando se deseja ter um melhor desempenho em altas velocidades como nas competições. A composição do robô (tamanho, forma, sensores, peso, etc) nestas condições pode influenciar o seu desempenho, sendo necessário realizar um estudo sobre o possível impacto de cada componente e propor pequenas melhorias de forma a melhorar o desempenho do robô.
O foco deste trabalho foi direcionado ao sistema de sensoriamento, ao avaliar possíveis configurações sob as mesmas condições, alisando a quantidade, o tipo e posicionamento dos sensores, e seus respectivos impactos no robô.
Foi utilizado o robô da equipe de robótica PatosBot como referência, equipe orientada pelo prof. Laurence, onde a própria placa de circuito impresso é utilizada como estrutura mecânica.
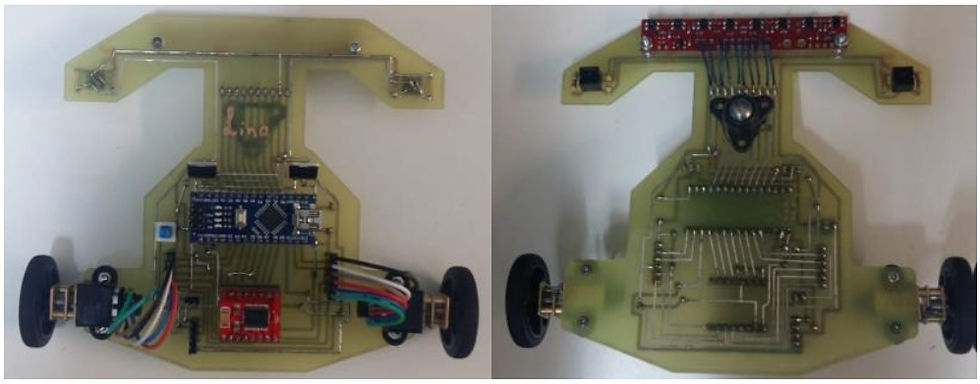
Robô original da PatosBot da UFU Patos de Minas
O trabalho realizado pelo aluno foi a construção de um novo protótipo com a ponteira modular, ou seja, onde é possível trocar a configuração do sensoriamento.
Para isso foi feito o esquemático e o layout da nova placa, sendo a mesma confeccionada no laboratório da UFU Patos de Minas. Para auxiliar a fixação foram modeladas peças em 3D e impressas na impressora 3D do laboratório.

Layout de uma das placas à esquerda, seguido pela confecção da placa na Prototipadora, pelo modelo 3D das peças e pela impressora 3D utilizada.
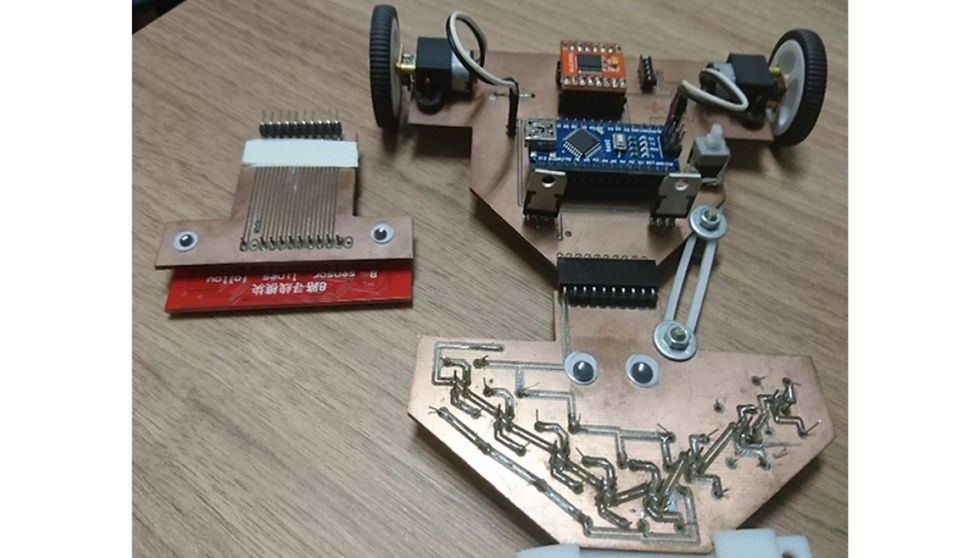
Como resultado, foram feitos 3 ponteiras e a base do robô, conforme indicado abaixo.
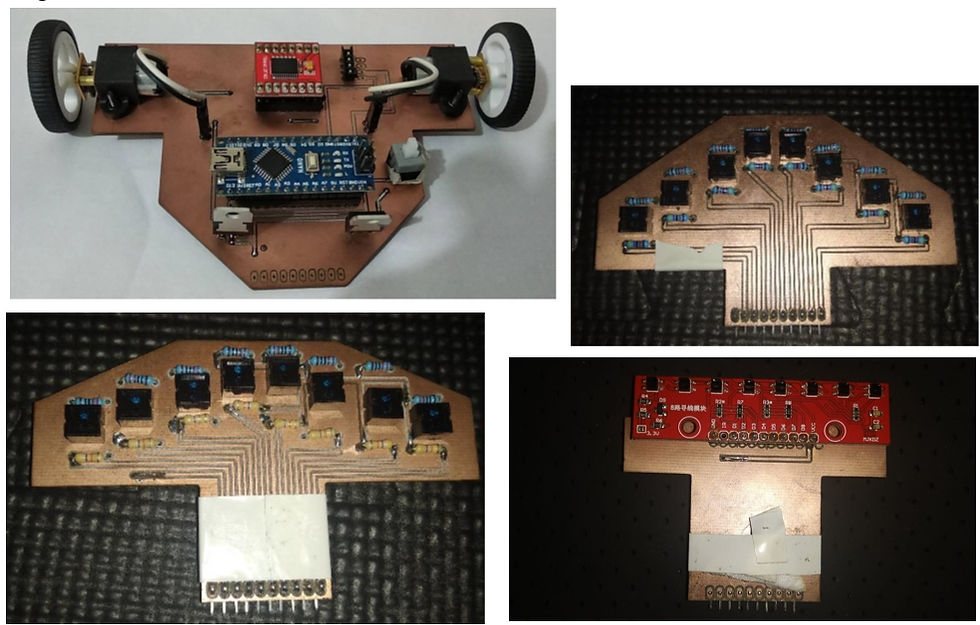
Protótipo construído pelo aluno.
Dentre todos os testes em uma pista circular, o robô teve melhor desempenho com a ponteira triangular (no canto superior direito) em relação as demais.
A principal dificuldade do projeto foi a elaboração do protótipo que demorou mais que o esperado e a resolução de diversos problemas que surgiram ao decorrer do tempo, como a fixação das placas. Desejava-se realizar a elaboração de um 4º bico multiplexado, mas devido aos problemas encontrados, não houve tempo hábil para elaboração deste bico com mais de 8 sensores.
No entanto, dada a experiência adquirida na elaboração do projeto, na confecção de todo o protótipo desde o projeto até a solda final, a pesquisa e levantamento dos protótipos, a modelagem e impressão 3D e todas as demais experiências, é considerado que o projeto foi um sucesso.
Como meta de projeto futuro, deseja-se elaborar um estudo comparativo com mais bicos de sensoriamento utilizando o mesmo sistema, realizar o melhoramento do encaixe entre as placas e analisar a possibilidade de transformar o sistema de processamento modular, compatibilizando os pinos do Arduino Nano com os pinos de outro sistema microcontrolado.
Se quiser saber mais sobre o projeto, de uma olhada no Relatório Final do Marcus em: PDF Relatório Final


Comentários