

TCC: Sistema de Monitoramento e Mapeamento por Robô Móvel
- Daniel Costa Ramos
- 30 de mar. de 2020
- 3 min de leitura

Atualizado: 5 de mar. de 2022
Orientado: César Helly Soares Santos Júnio Data: 08/2019 Link: Repositório UFU

A robótica móvel é um campo de pesquisa abrangente e extremamente importante por ser necessária em diversas áreas, como em indústrias de mineração, aeroespacial, agricultura, entre outras.
Na maior parte de suas aplicações é necessário que os robôs naveguem em ambientes desconhecidos e com isso surge a necessidade de um mapeamento territorial, uma vez é necessário conhecer um local. Quando se trata de um ambiente de risco ou muito dinâmicos como aplicações em minas, situações de desastre ou para trabalhos de inspeção, esse mapeamento é ainda mais importante.
Os tópicos de localização e mapeamento são campos de pesquisas clássicas na robótica móvel, que quando tratados simultaneamente são denominados de SLAM (Simultaneous Localization and Mapping). Neste caso, o robô deve se localizar em um ambiente desconhecido e realizar o seu mapeamento, a partir das informações obtidas por sensores.

Exemplo de mapeamento representado em um mapa de grade (matricial). Branco representa espaço livre, preto ocupado e cinza o não explorado.
Os algoritmos de SLAM são limitados aos recursos disponíveis no robô e no ambiente e, portanto, não almejam a perfeição e sim um funcionamento operacional. Uma aplicação particular do SLAM é a questão de mapeamento em tempo real do ambiente, assistido por um usuário. Neste caso, a navegação do robô pode ser inicialmente autônoma e quando é detectado uma anomalia no ambiente, o operador pode passar a controlar o robô de forma manual, iniciando um processo mais delicado e detalhado de inspeção do ambiente.
Este trabalho aborda o mapeamento feito por robô móvel de forma autônoma-manual, e o seu monitoramento, podendo ser assistido por um usuário, pois mesmo em mapeamentos exclusivamente autônomo, erros podem ser acometidos, necessitando uma intervenção humana para corrigir esses erros ou problemas. O mapeamento é feito de forma simultânea com o monitoramento.

Mapa métrico e mapa topológico.
Várias teorias de mapeamento foram estudadas, técnicas de mapeamento foram escolhidas com base nesses estudos, e com base em trabalhos de diferentes autores com finalidades parecidas. Foram também escolhidos o sensor e a comunicação que melhor satisfazia os requisitos do protótipo.
Para este fim, são usados sensores de velocidade e sensor ultrassônico, mapeamento métrico por grade, placa de processamento baseado no Arduino e tecnologia de comunicação Bluetooth.

Fluxograma de funcionamento do protótipo.
A construção do mesmo foi apresentada em detalhes de forma didática para facilitar a reprodução do mesmo, assim como foram apresentados os resultados comprovando o seu correto funcionamento.

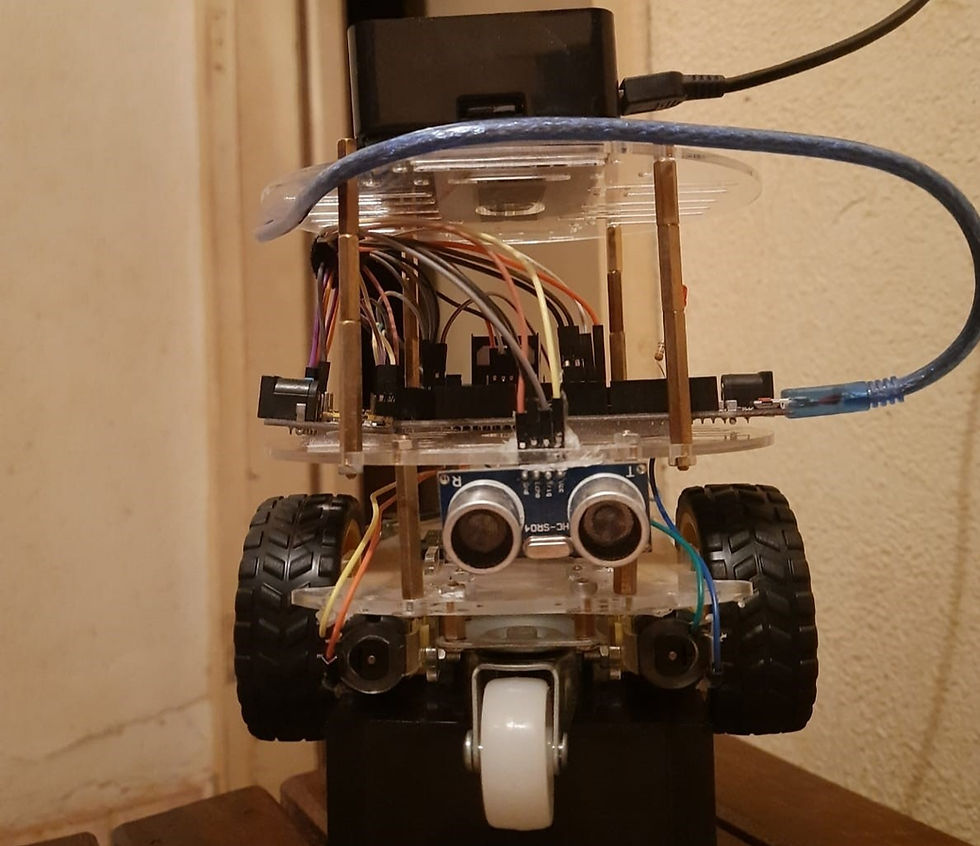
Componentes utilizados no protótipo.
Os resultados demonstram a capacidade do robô em mapear um ambiente desconhecido de forma satisfatória, levando em conta a utilização de materiais de baixo custo.

Representação do robô em um mapa disponibilizado no computador.
Os resultados do protótipo foram satisfatórios ao considerar a quantidade de fatores limitantes, como as limitações impostas ao se utilizar uma plataforma de baixo custo. O mapeamento é capaz de identificar objetos a frente do robô e realiza o correto mapeamento a partir do ponto de partida conhecido no mapa.

Resultado de mapeamentos simples sem e com obstáculo.
O problema de localização e mapeamento é complexo, é uma área que demanda conhecimentos multidisciplinares avançados, mas que pôde ser inicialmente abordada de forma satisfatória neste trabalho.
Além das limitações citadas, houve dificuldades em lidar com sistemas de comunicações mais avançados, devido ao tempo requerido para lidar com todos os problemas encontrados. Desta forma, a mesma foi simplificada por meio da utilização do Bluetooth, sendo escolhido neste trabalho focar no robô e na geração do mapa.
As sugestões de continuidade deste trabalho são diversas. É possível utilizar algoritmos mais avançados para realizar o mapeamento automático, como por exemplo, a utilização de algoritmos genéticos e de redes Bayesianas.
Outra sugestão é o melhoramento da plataforma robótica ao atualizar sua comunicação para Wi-Fi em vez do Bluetooth, ao instalar rodas livres que não interfiram no movimento do robô, melhorar a aderência do robô ao solo, melhorar a qualidade dos motores ou criar formas de melhor compensar a diferença entre os mesmos e uso de mais sensores de distância e de estados internos, como por exemplo, um sensor inercial.
O trabalho também pode ser aproveitado e expandido para um mapeamento tridimensional e (ou) utilizar outros tipos de robôs para realizar o mapeamento.
Por fim, a construção do protótipo robótico foi uma forma de enriquecer o conhecimento multidisciplinar, pois consiste em pensar, estudar diversos conceitos nas engenharias, planejar sistemas de comunicação, sistemas de mapeamento, entre outros. É preciso estudar os conceitos de mapeamento, eletrônica, mecânica, programação e de microcontroladores, e colocar todo este conhecimento para trabalhar em conjunto, contribuindo assim para a formação acadêmica do aluno.
Veja a Monografia Completa em: Repositório UFU


Comentários